.png)
-
수신전용
-
TEL
-
FAX
-

-
.png)
수신전용
TEL
FAX
안정 제어시의 진동을 억제하는 것으로부터 조정을 시작합니다.
I와 D의 비율은 4 : 1 ~ 6 : 1이 기본이지만, 드물게 D가 크게
설정되어있는 경우가 있습니다.
이것이 진동의 원인이되므로 D를 줄이십시오.
P의 값도 진동과 관련된 매개 변수이지만, 출력의 움직임을 관찰하여
P를 줄이거 나 확대 여부를 판정하여보십시오. (자세한 내용은 동영상을 참조하세요)
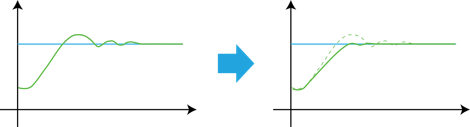
P가 작고 설정 빠듯이까지 높은 출력이 나오게됩니다.
이것이 오버 슈트의 원인이되기 때문에, P 확대합시다.
이 때, I와 D도 작게 설정되어있는 경우가 많기 때문에,
P, I D를 모두 같은 비율로 확대 해보십시오.
한편, P가 너무 크면 출력을 줄이는 움직임이 둔해집니다.
이것도 오버 슈트의 원인이 될 것이므로, P를 작게하는 것도 검토하십시오.
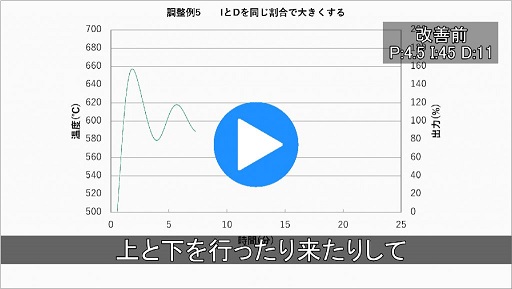
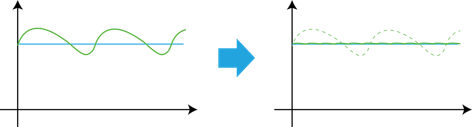
감쇠 진동이 발생하는 경우라면,
를 움직이지 않고, I와 D를 같은 비율로 확대 해보십시오. (자세한 내용은 동영상을 참조하세요)
여름에 조정 한 PID 값에서 겨울 제어하면
안정 시간이 늦어지는 경우가 있습니다.
이것은 단순히 기온이 낮기 때문이 아니라
조절계의 출력을 억제 너무있는 것이 원인이있을 수
있습니다.
이 경우 I와 D를 같은 비율로 줄이거 나
정도에 따라 P, I D 모두를 같은 비율로 줄여보십시오.(자세한 내용은 동영상을 참조하세요)
※ 어디 까지나 치노의 조절계를 사용하는 경우의 예입니다.